Starting Torque:
The torque is being developed at the starting time of the motor. It is also called as breakaway torque. The starting torque of the synchronous motor is purely depending on the method of starting the motor.
Running Torque:
The full load torque of the motor is called running torque. The running torque is defending on the motor specifications.
Pull-in Torque:
Let we assume the synchronous motor is started and the speed is nearer to the synchronous speed, during that time the stator pulls the rotor into synchronism, that torque is called pull-in torque.
Pull out Torque:
Let we assume the motor is running at the maximum torque, beyond that slight increase in load causes the motor pulls out the synchronism, that maximum torque is called pull out torque. The pull out torque will be three to four-time of the full load torque of the motor.
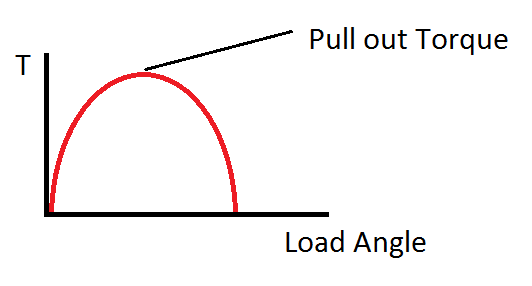
Refer to fig 1.1 of torque vs speed characteristic of the Synchronous motor.
At load angle 90 degree the motor produces the maximum torque. Further increasing the loads, the magnetic locking between the stator and rotor become weak. Then the motor stops. Therefore, the maximum torque is produced by the motor without loss of synchronism is called pull out Torque.







{kind=link}